前向星是一种特殊的边集数组中的每一条边按照起点从小到大排序,如果起点相同就按终点从小到大排序,并记录下某个点为起点的所有边在数组中的起始位置和存储长度,那么前向星就构造好了。
- 用
len[i]来记录所有以i为起点的边在数组中的存储长度 - 用
head[i]来记录以i为边集在数组中的第一个位置
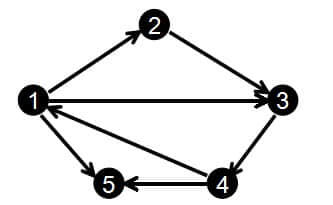
我们输入的边的顺序为
11 2
22 3
33 4
41 3
54 1
61 5
74 5
排序后就得到
1编号: 1 2 3 4 5 6 7
2起点u: 1 1 1 2 3 4 4
3终点v: 2 3 5 3 4 1 5
得到
1head[1] = 1 len[1] = 3
2head[2] = 4 len[2] = 1
3head[3] = 5 len[3] = 1
4head[4] = 6 len[4] = 2
但是利用前向星会有排序操作,如果用快排时间复杂度至少为 O(nlogn)
如果用链式前向星,就可以避免排序
我们建立边结构体为
1struct Edge{
2 int next; // 与第i条边同起点的下一条边的存储位置
3 int to; // 表示第i条边的终点
4 int w; // 边的权值
5};
另外还有一个head[],它用来表示以i为起点的第一条边存储的位置,实际上你会发现这里的第一条边存储的位置其实在以i为起点的所有边的最后输入的那个编号。
head[]一般初始化为-1,对于加边的add函数是这样的
1void add(int u, int v, int w){
2 edge[cnt].w = w;
3 edge[cnt].to = v;
4 edge[cnt].next = head[u];
5 head[u] = cnt++;
6}
初始化 cnt = 0 ,来模拟一下
1edge[0].to = 2; edge[0].next = -1; head[1] = 0;
2edge[1].to = 3; edge[1].next = -1; head[2] = 1;
3edge[2].to = 4; edge[2].next = -1; head[3] = 2;
4edge[3].to = 3; edge[3].next = 0; head[1] = 3;
5edge[4].to = 1; edge[4].next = -1; head[4] = 4;
6edge[5].to = 5; edge[5].next = 3; head[1] = 5;
7edge[6].to = 5; edge[6].next = 4; head[4] = 6;
很明显,head[i]保存的是以i为起点的所有边中编号最大的那个,而把这个当作顶点i的第一条起始边的位置。
这样在遍历时是倒着遍历的,也就是说与输入顺序是相反的,不过这样不影响结果的正确性。
比如以上图为例,以节点1为起点的边有3条,他们的编号分别是0,3,5 而 head[i] = 5
我们在遍历以u家电为起始位置的所有边的时候是这样的
1for(int i = head[u]; ~i; i = edge[i].next)
那么就说先遍历编号为5的边,也就是head[1],然后就是edge[5].next,也就是编号3的边,然后继续edge[3].next也就是编号0的边,可以看出是逆序的。
除另有声明外,本博客文章均采用 知识共享 (Creative Commons) 署名 4.0 国际许可协议 进行许可。转载请注明原作者与文章出处。